|
|
Research & Development in AI and RoboticsBesides biometrics, Neurotechnology's current field of research is artificial intelligence (AI) and mobile autonomous robots. The company's AI division was founded in 2004. The project's scope is development of a mobile autonomous robot technology that might be able to perform simple tasks in the real environment. First mobile robot prototypeIn 2004 the first mobile robot was built for autonomous navigation tests. The robot included wheeled chassis, vision system for landmarks detection, wireless connection system with regular PC and PC based neural network software for robot control. Although this robot was partially able to navigate in the office, it had some major limitations due to its chassis construction and vision system. Second mobile robot prototypeIn 2005 the next version of mobile robot has been built. It featured bigger four-wheel drive chassis. Robot uses advanced turn and vision systems. As the previous robot, it is connected to a regular PC, where neural network based control system is implemented. The video clip shows a sample of the robot's navigation in a regular office environment:
Download robot's navigation sample video
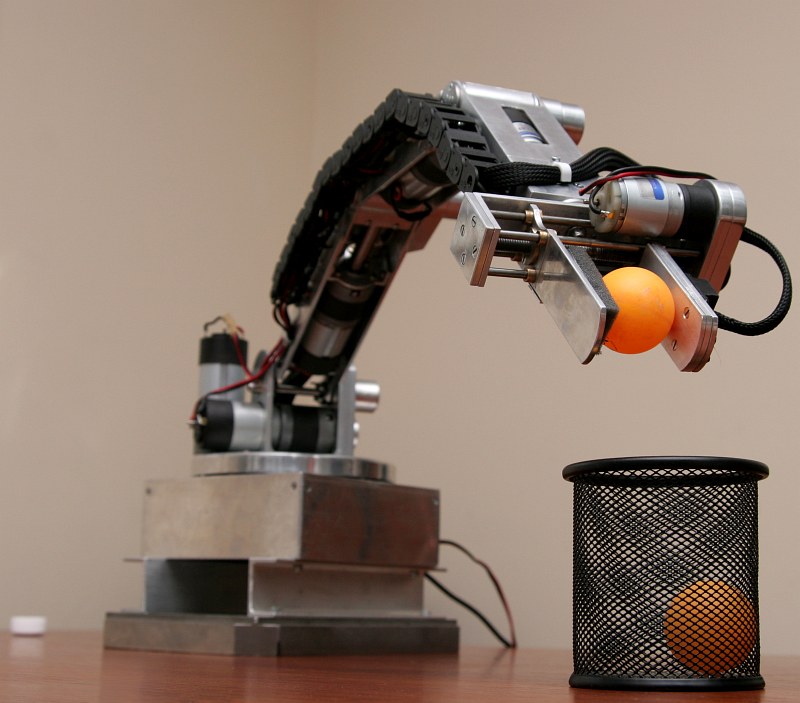
SentiBotics Development KitIn 2014 Neurotechnology has released SentiBotics – a mobile robotics development kit. SentiBotics enables the rapid development and testing of mobile robots and comes with software, sample programs, a tracked platform and grasping robotic arm, 3D vision, object recognition and autonomous navigation capabilities. The kit includes a mobile robotic platform with a 3D vision system, modular robotic arm and accompanying Neurotechnology-developed, ROS-based software with complete source code. The programming samples included in the robotics development kit demonstrate a number of capabilities, including how to teach the robot to recognize and grasp objects and how to use the robot to create a map of the local environment that the robot can then use for autonomous navigation in the learned environment. Robotic visionIn 2007 Neurotechnology has released SentiSight SDK for developing PC-based object recognition systems. To date, several major versions of the SDK has been released. The underlying technology enables the learning of objects and searching for learned objects in images from almost any camera, webcam, still picture or live video. In 2012 SentiSight Embedded SDK was released. The SentiSight Embedded allows to use all advantages of the SentiSight PC-based technology on smartphones and tablets, as well as provides full compatibility with the PC-side SentiSight SDK. Mechanical manipulatorA mechanical manipulator has been developed and produced by our partner Neuromechanica. The manipulator features:
Download manipulator demonstration videosNote that the manipulator in the sample videos was controlled by preprogrammed sequences of actions.
Cooperation and employment opportunitiesWe would be interested to cooperate with companies and researchers' groups involved into similar problems. Also we have job offers for artificial intelligence and autonomous robotics developers to take part in this project. Please contact us for more information. Please, also review job offers in biometrics field. Contact information
Neurotechnology
Phone: +370 5 277 3315 |
Products
AFIS or multi-biometric fingerprint, iris, face and voice identification for large-scale systems.
More products for developers:
End-user products:
|